Драйвер биполярных шаговых своими руками

Драйвер шагового двигателя, TB6600
Драйвер шагового двигателя TB - предназначен для управления биполярным шаговым двигателем с номинальным напряжением от 9В до 42В и пиковым током до 4,0А. Драйвер оснащен защитой от перегрева, от повышенного напряжения и от перегрузки по току. Все входы управления имеют оптическую развязку. Биполярные двигатели с 4 выводами подключаются по схеме А. Двигатели с 6 выводами подключаются по схеме Б или В.












Драйвер шагового двигателя TB - предназначен для управления биполярным шаговым двигателем с номинальным напряжением от 9В до 42В и пиковым током до 4,0А. Драйвер оснащен защитой от перегрева, от повышенного напряжения и от перегрузки по току. Все входы управления имеют оптическую развязку. Биполярные двигатели с 4 выводами подключаются по схеме А. Двигатели с 6 выводами подключаются по схеме Б или В. Двигатели с 8 выводами подключаются по схеме Г или Д.









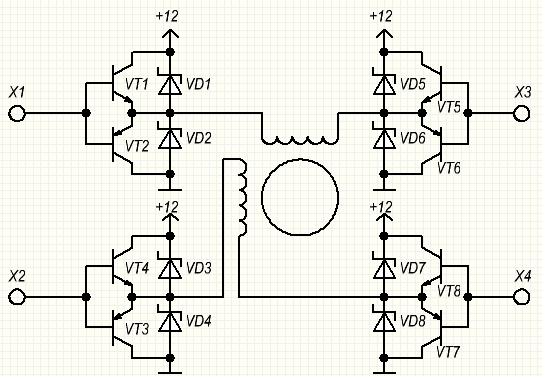
Драйвер LN используется радиолюбителями для многофункционального управления двигателями постоянного тока. Схема модуля, состоящая из двух H-мостов, позволяет подключать к нему один биполярный шаговый двигатель или одновременно два щёточных двигателя постоянного тока. При этом есть возможность изменять скорость и направление вращения моторов. Управление осуществляется путём подачи соответствующих сигналов на командные входы, выполненные в виде штыревых контактов.